

Research
1) Human Machine Teaming (HMT)
In this work decision-making is defined as a process resulting in the selection of a belief or a course of action. The human decision-making process is a complex process involving the integration of the human’s sensory and internal information as well as the action/belief itself in the decision-making process. Sensory information comes from the five human senses – sight, hearing, touch, taste and smell. Internal information is embedded within the human brain such as personality traits, experiences, perspectives, beliefs or values. Human internal information can also consist of mood or environmental effects. The human decision-making process is a feed-back process where the action/belief is continually assessed and updated based upon sensory and internal data inputs as shown in Figure 1.
In the most general sense, a machine is any device that can be used to perform a task and usually operated by humans [5]. A machine can be as simple as a blender or complex as an automobile, a remotely piloted ground vehicle or a remotely piloted aircraft. Complex machines contain feed-back control schemes embedded in their design. For example, even though a
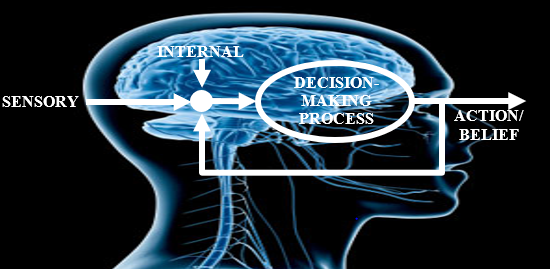 Figure 1. Human Decision-Making Feed-Back Process
Figure 1. Human Decision-Making Feed-Back Process
human controls the speed of an automobile by applying pressure to the gas pedal, the automobile fuel control system decides the amount of fuel to send to the engine from the gas tank.
For humans operating complex machines the interaction between the two ends of the operation is performed by an human-machine interface. The designed human-machine interface performs (a) transformation of human actions to command actions for the machine and (b) transformation of the machine sensory information to human information e.g. audio, video display etc., to be interpreted by the human senses as shown in Figure 2. In the transformation processes as shown in Figure 2, the form, structure or substance of data is changed as it passes through the interface. In designs for current human-machine interfaces, the transformations processes are static, meaning the transformation processes do not change based on the state of human or machine.
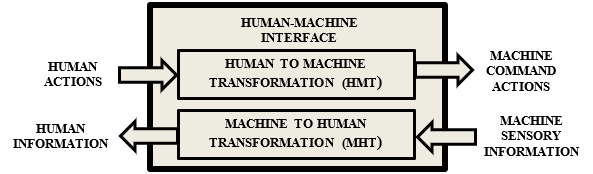
Figure 2. Human-Machine Interface Diagram
Also, in the current human, machine, and human-machine interface framework, each of the framework entities perform its respective task in isolation without actually working together or in a singular word - teaming. The term “teaming” is defined by Webster as the working together of entities to achieve a common goal. This lack of teaming concept is in essence due to the open-loop characteristics of the current human, machine and human-machine interface framework. To be more specific, (a) neither the human decision-making process nor the how the human’s action are performed are considered in the machine control system; (b) the state of the machine is not considered in the human decision-making process and; (c) the human-machine interface does not consider the human decision-making process, how the human’s action are performed, nor the human or machine states in the transformation processes. The fact of the matter is true human-machine teaming is a closed loop framework as shown in Figure 3. My research focuses on the human, machine, and interface from a closed loop perspective for realization of HMT.
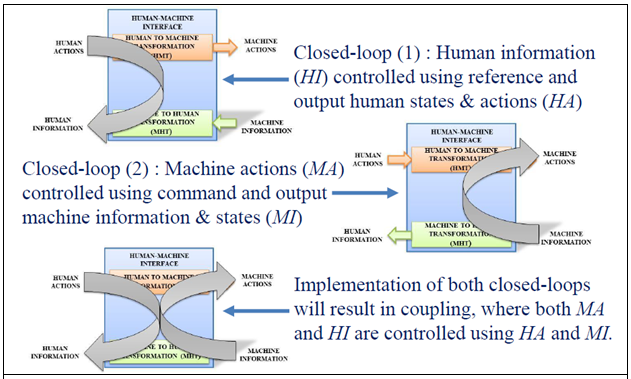 Figure 3. HMT Closed-Loop Diagram
Figure 3. HMT Closed-Loop Diagram
- TSU Multiple Attribute Task Battery Software
- HMT Decision Making Architectures